Voltage regulator for brushless synchronous
generator
with harmonic excitation winding
 When
I set up my home in what some people like to call "wilderness", I built
a microhydro system to provide for all the energy needs in my home. For
this purpose I bought two generators, to use one permanently and have
the other as a spare, to be swapped in case of serious trouble.
When
I set up my home in what some people like to call "wilderness", I built
a microhydro system to provide for all the energy needs in my home. For
this purpose I bought two generators, to use one permanently and have
the other as a spare, to be swapped in case of serious trouble.
The chosen generators are of the Chinese TFDW type. These come with an
AVR, that is, an "automatic voltage regulator". In 11 years of
continous use, I have had three failures of those AVRs. The
first one happened
due to a voltage transient caused by a nearby lightning hit, which
killed that AVR but very little else, because the original AVR was
(mis)designed in such a way that it is extremely sensitive to
transients. That time I swapped the dead AVR for the one in my spare
generator, and then tried to take apart the dead one, to either fix it
or copy it. They come potted in hard black epoxy resin, which is great
to avoid failure from vibration, but nasty when it comes to repairing.
I managed to take it apart, using a lot of heat, patience and brute
force, but
after reverse-engineering it I found its design to be so poor that it
wasn't a good idea to repair it, let alone build a copy.
I ordered two new AVRs from China. They are very inexpensive. The
problem is that none are available that fit the TFDW generator really
well. The closest
fit is one made for the ST line of generators, which are brush-type
machines, but at least use the same excitation winding system as the
TFDW. So I bought two GB-160 AVRs, but unfortunately they don't work
correctly with the TFDW generators. The combination is
unstable, making the output voltage oscillate by several tens of volts
at roughly 3Hz.
Shortly later the second original AVR failed, and this time there was
no external cause. Simply its little power transformer burned out.
Small 50Hz transformers have thousands of turns of very thin wire,
which tends
to corrode at the soldered ends, due to tiny residues of
corrosive flux, or simply oxygen and moisture in the air.
Given the emergency I had to install one of the new GB-160
AVRs, and live with dramatically flickering lights and a dancing
refrigerator, while I fixed the failed AVR. I had to find a suitable
transformer for it, and I had to remove its electronic board from its
metal shell, which I did by heating the shell with a blowtorch, to
quickly soften the epoxy between the board and the shell before
overheating the components. It worked, enabling me to remove the board,
and
replace the dead transformer on it.
Two years later this AVR started failing again, in a gradual way. The
regulation got ever
worse, it got ever more sensitive to load transients, very likely due
to
failing electrolytic capacitors. It has several of them, installed very
close to power resistors and other parts that get hot. That's a sure
recipe for failure after some years of use.
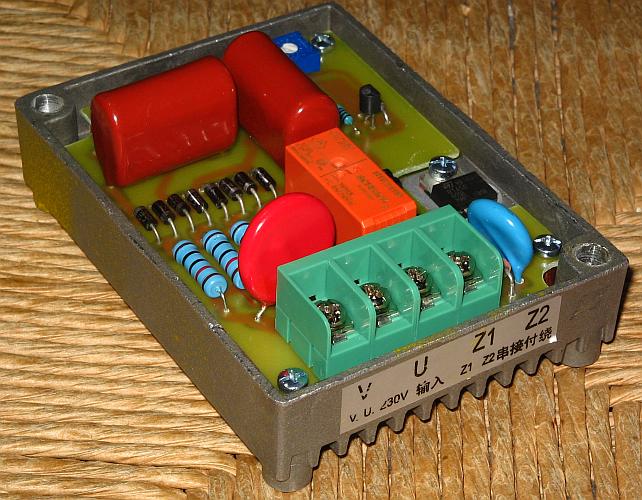
At that point I decided to finally design my own AVR for this
generator. I built it into the shell of the first original AVR, with
the
terminal block at the same place, for best mechanical compatibility.
The result is what you can see in the title photo.
Dynamics of brushless generators
Conventional brush-type generators are simple animals: A DC-powered
field
winding rotates inside a stator, which can have a
single-phase or
a three-phase winding. The DC is applied to the field via carbon
brushes and sliprings. At the rated speed, roughly half the maximum
rated field voltage and current are needed to produce the nominal
output voltage, while at full load nearly the full excitation is
needed. For the sake of control loop analysis, those generators have
basically a single-pole response, the pole frequency given mainly by
the resistance and inductance of the field winding. Additional poles
appear only at frequencies so high that they don't cause trouble. Such
a generator is easily controlled by any simple proportional or
proportional-integral controller. Most AVRs for them use just
proportional
control, with relatively high gain.
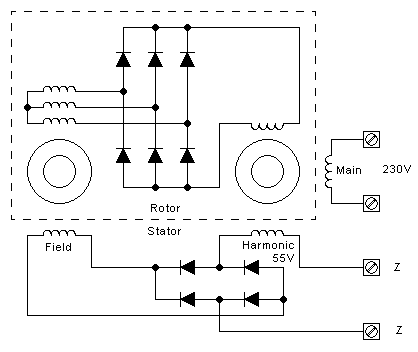 But
the TFDW is a brushless synchronous generator, that
is,
instead of feeding the rotating field winding by means of carbon
brushes and sliprings, it has a second generator mounted on
the
same shaft, called an exciter machine. This exciter has the field
winding in the stator, and a three-phase winding on the rotor. Its
output is rectified by a three-phase bridge mounted on the shaft,
and the resulting DC goes to the field winding on the rotor of
the
main machine.
But
the TFDW is a brushless synchronous generator, that
is,
instead of feeding the rotating field winding by means of carbon
brushes and sliprings, it has a second generator mounted on
the
same shaft, called an exciter machine. This exciter has the field
winding in the stator, and a three-phase winding on the rotor. Its
output is rectified by a three-phase bridge mounted on the shaft,
and the resulting DC goes to the field winding on the rotor of
the
main machine.
As a result of this architecture, there are no brushes nor sliprings,
eliminating the constant maintenance headache related to them. But the
AVR for such a generator has a harder job to do, because the generator
has a two-pole response: Both the field winding of the main machine and
that of the exciter have a slow response, given by their high
inductances. And in my TFDW generator both of them happen to
have
almost exactly the same pole frequency: 4.5Hz.
Two poles on the same frequency is somewhat of a problem to a
controller. A proportional controller will make the system oscillate,
as soon as it has a decent gain. That's what happens with the GB-160
AVR. A PI controller will also oscillate, if the P gain is high enough.
A PID controller should be able to control such a machine well enough.
But there is a problem: Since the output is an alternating voltage, it
needs to be rectified and filtered to take a sample for regulation. And
this filtering adds a third pole! If this third pole's frequency is
within the same order of magnitude as the machine's two poles, we will
get an oscillator even when using a PID controller. And that filter's
pole cannot be very much higher than 4.5Hz, because it needs to provide
good rejection of the rectified 50Hz signal (100Hz), and it cannot be
very much lower than 4.5Hz, because then the AVR's reaction to load
changes would be too slow! So, we do have a problem.
I intend to eventually design a "perfect" AVR for this type of
generator, but for the moment, as a quick and dirty solution that works
well enough, I decided to use the same old principle used
in many AVRs
over many decades: Make a simple proportional controller, make its
phase delay as small as possible, and make its gain just low
enough so the system is stable. And then live with whatever voltage
stability it produces. That's the AVR described
in this article.
Harmonic and outphased excitation windings
The DC for the field winding needs to come from somewhere, and an AVR
needs to get powered in some way too. A simplistic approach is to use
the 230V output for both purposes, and many commercial AVRs do just
that. In a benign environment (no overloads, no short circuits, and
with a speed-regulating prime mover) it works well enough, but when the
generator has to supply current surges, for example to start motors
(compressors, refrigerators, electric tools) it doesn't work so well,
because when the surge happens and the voltage sags, the field current
will also sag until the AVR has time to respond. This will exacerbate
the voltage drop caused by the overload. And in the case of a
microhydro turbine driven generator, this is even dangerous: A short
circuit at
the output will shut off excitation, so the generator will stop
generating, and the turbine will make it overspeed. This can
mechanically destroy the machine, due to centrifugal force!
To improve this, many generators have a special excitation winding on
the main stator. This is not just a lower voltage winding working
parallel to the main 230V winding, because if it were, its voltage
would
drop whenever that of the 230V winding drops. Instead it's either an
outphased winding, typically wound in 90° phase relative to the main
winding, or it is an harmonic winding, wound at 3 times shorter pitch
than the main winding. When there is a heavy load on the generator, the
magnetic field in the stator distorts, weakens in the direction where
the main winding works, and thus strengthens in the direction of the
outphased winding, so that this outphased winding will increase its
output voltage. Also the harmonic contents of the field in the stator
will increase, leading to a higher output voltage from an harmonic
winding. So, if a harmonic or outphased winding is used to power the
generator's excitation winding, this will tend to compensate for the
load-induced voltage drop, just like in a compound generator. And in
the event of a short circuit, the generator will remain strongly
excited. This gives such generators the ability tu supply very large
transient currents, for example to start large motors.
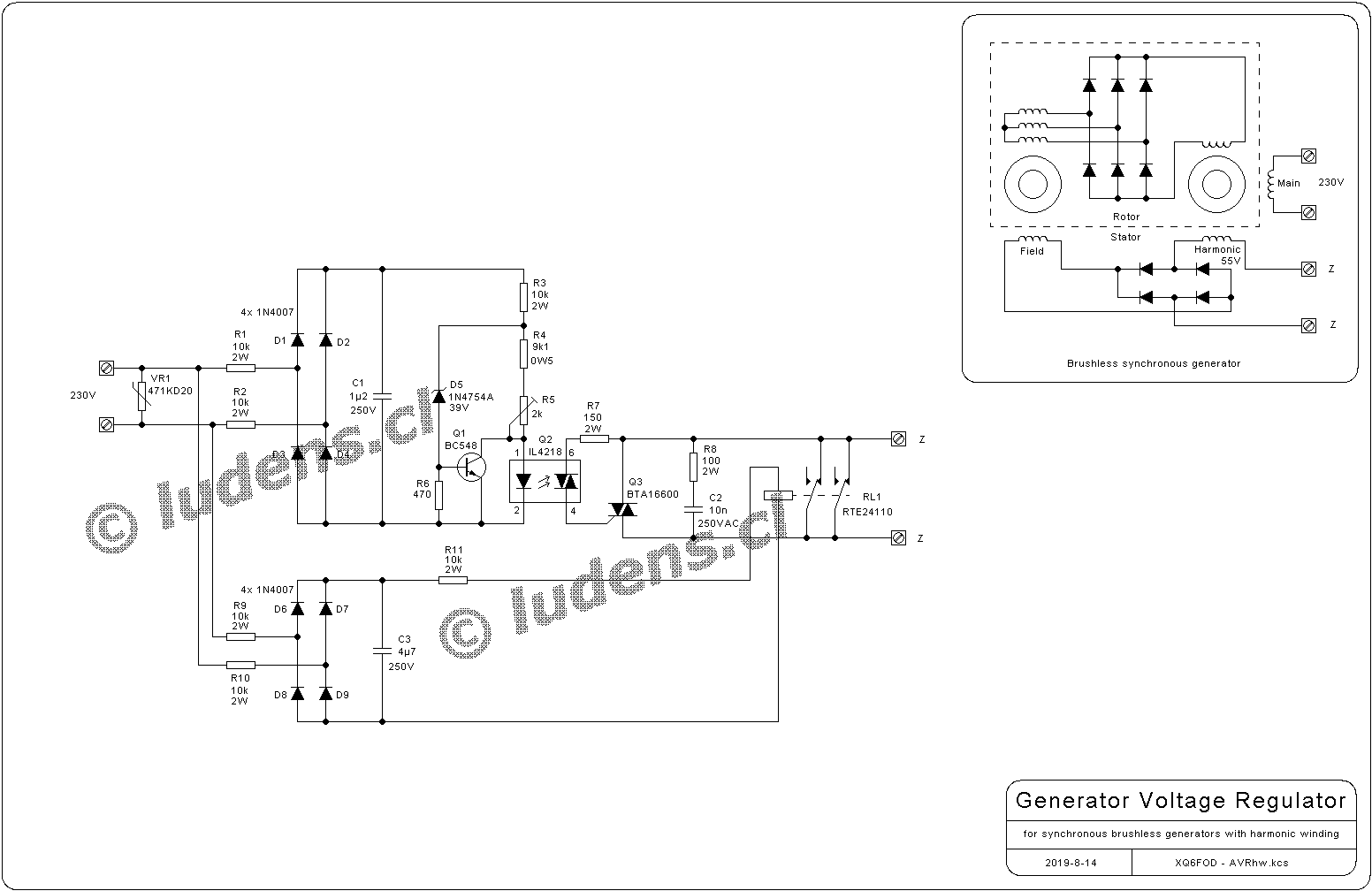
The TFDW generator has both an outphased winding and an harmonic
winding. I haven't investigated how they are connected, but I assume
that they are simply in series. Under typical operation, at nominal
output voltage and about one third the maximum load, my generator has
roughly 55V on this winding. As shown in the generator schematic above,
the output of this winding is rectified and applied to the field
winding, with two terminals named "Z" in between. I understand that an
older version of this generator model had just a rheostat connected to
those
terminals, to set the output voltage, while all load compensation was
done through the effect of the combined harmonic and outphased
windings. Later an AVR was added to provide a stable output voltage
that doesn't require adjustment, and this AVR in principle does't need
to be very fast or to have high gain, because a good amount of load
compensation comes simply from the use of these special auxiliary
windings.
There are several models of AVRs for brushless generators on the
market, such as the GAVR-8, GAVR-12 and larger ones, which don't use
these windings, instead taking all their power from the main 230V
output. While they should work with the TFDW generator, I didn't want
to use any of them, mainly to avoid the risk of a short circuit on the
output causing excitation loss and allowing the rotation speed to run
away, possibly destroying the machine.
So, after all analysis of my generator model and of the available AVRs,
I decided to build a new AVR that pretty much copies the same
functionality of the original one, but in a simpler, more elegant and
more reliable circuit. Although I don't think that galvanic isolation
between the generator's output and the excitation circuitry is
necessary, the original AVR had this, so I designed the new one to
have it too.
The new AVR
 This
regulator is an excellent example of a very simple circuit that works
in a much more sophisticated way than what's apparent at first sight.
This
regulator is an excellent example of a very simple circuit that works
in a much more sophisticated way than what's apparent at first sight.
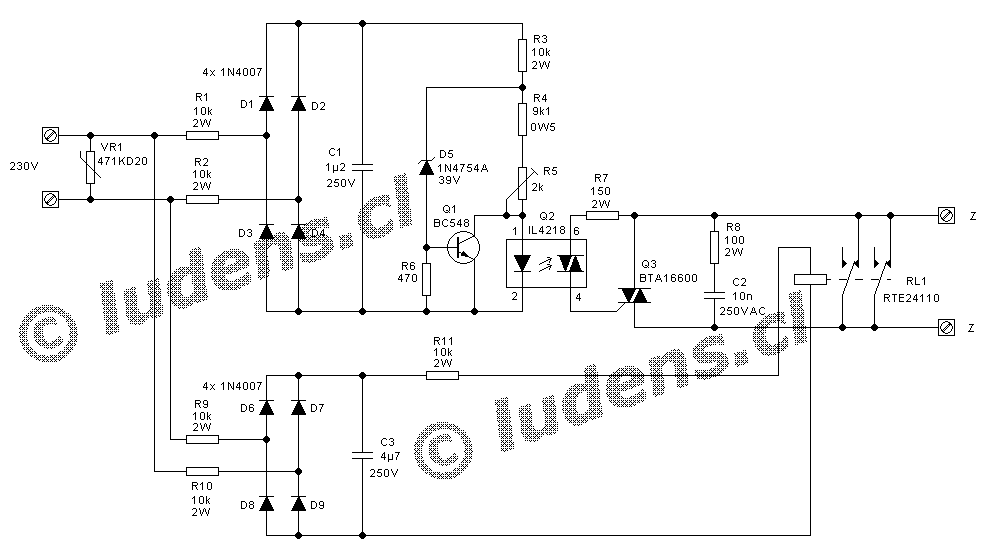
Whenever the generator isn't running, or running very slowly,
the
relay is in resting position, holding the Z contacts closed. This
allows the generator to self-excite as soon as it reaches a sufficient
speed. As the speed increases further, so does the voltage. Through
D1-D4 and the resistors in that part of the circuit, the optoTRIAC will
get enough input current to turn on as soon as the generator's
voltage
exceeds roughly 40V. The zener diode is still far from conducting, and
so Q1 stays off. As the generator's speed keeps increasing, and
also its voltage, eventually the relay pulls in and opens the
connection across the Z contacts, but by this time the optoTRIAC is
solidly on, leading to the triggering of Q3, which keeps the Z contacts
essentially joined by the TRIAC.
When the generator's voltage reaches the setpoint, at nominally 230V,
the zener diode conducts enough current to cause a voltage drop across
R6
that brings the transistor into conduction. At this point the
transistor will rob current from the optoTRIAC, which will turn off.
This leads to Q3 turning off on the next zero crossing of the
generator's excitation winding's current. The circuit now goes into
pulse-width-modulating mode: The voltage on C1 is a DC level with
a significant amount of 100Hz ripple on it. This ripple makes
Q1
change its conduction in such a way that the optoTRIAC turns on and off
at a 100Hz rate, a small change of the generator's voltage causing a
small shift on the DC level on C1, changing the amount of the ripple
waveform that lies above the point that turns Q2 off, so that the duty
cycle of Q2 varies from zero to 100% when the generator's output
voltage varies over a few volt.
While Q2 gets 100Hz pulse-width-modulation, the field voltage follows
this in a somewhat strange way, since the generator's excitation
winding outputs a mix of outphased 50Hz and 150Hz voltage, producing a
waveform that changes with generator loading. But this strangeness in
the resulting voltage waveform doesn't cause any trouble, because it's
happening at frequencies where the high inductance of the field winding
performs a very good smoothing action. The field current is a pretty
smooth and clean DC. The rectifier bridge in the generator not only
rectifies the AVR-controlled AC into a DC, but also acts a as a
free-wheeling diode for the field winding.
It has to be understood that this AVR does not regulate to a perfectly
fixed voltage. Instead it regulates the output into a small voltage
range, that
is, the generator's output voltage will drop by a small amount when the
load increases. In most applications this is acceptable, and in some
cases it's even desired. If necessary this behaviour could
be compensated or even overcompensated by compounding the 230V
input to the AVR by means of a suitable current transformer and load
resistor that senses the generator's output current. Overcompensation
can be used to make the generator increase its output voltage with
load, to cancel the voltage drop in long transmission lines to the
places where the energy is used.
When the generator is stopped, the relay will drop and short out the Z
terminals before the optoTRIAC turns off, thus the generator remains
excited until it's running too slowly to self-excite.
An interesting detail is how thermal compensation is implemented in
this AVR. Relatively high voltage zener diodes, like D5, suffer from a
pretty strong positive thermal coefficient. If left uncompensated, the
generator's voltage would rise in warmer weather, and would also rise
while the AVR warms up during use. So I compensated for this by using
the much smaller negative thermal coefficient of Q1: When both
D5
and Q1 get warmer, D5's voltage rises, requiring a higher voltage at
its cathode. At the same time Q1's base voltage drops slightly, at the
operating level where in average it robs just enough current from the
optoTRIAC. The lower base voltage causes a lower current to flow
through R6, which in turn reduces the current flowing through D5, and
thus through R3, R1 and R2. The resulting lower voltage drop
on
those resistors provides the required higher voltage at D5's cathode,
while keeping the generator's voltage constant.
For this thermal compensation to work properly, R6 must have
the
correct value relative to the other resistors in the circuit, and Q1
and D5 need to be at roughly the same temperature. I implemented the
latter by placing the transistor very close to the zener diode, keeping
them reasonably separated from power resistors, and installing the AVR
in my generator in such a position that D5 and Q1 do not get exposed to
warm air rising from the parts that get warm, mostly the
four input power resistors and the relay.
 It's
also very important to understand that the value of C1 is critical, and
needs to be optimized for the generator's characteristics. If you use
this AVR for a generator different from the 10kW TFDW, you should
absolutely try different capacitances, and pick the correct one. The
capacitance value has two effects: One is that the smaller it is, the
less phase lag it will cause, aiding stability and speeding up the
response. The other is that the larger it is, the more gain the AVR
will have. More gain causes tighter regulation, but beyond a certain
value the system will become unstable and oscillate, typically at a few
Hz.
It's
also very important to understand that the value of C1 is critical, and
needs to be optimized for the generator's characteristics. If you use
this AVR for a generator different from the 10kW TFDW, you should
absolutely try different capacitances, and pick the correct one. The
capacitance value has two effects: One is that the smaller it is, the
less phase lag it will cause, aiding stability and speeding up the
response. The other is that the larger it is, the more gain the AVR
will have. More gain causes tighter regulation, but beyond a certain
value the system will become unstable and oscillate, typically at a few
Hz.
In my original design I used 4.7µF for C1, which is also the reason why
I used 4.7µF for C2 - simply to use two identical capacitors and thus
reduce the number of different parts needed. That's also the reason why
the six power resistors are of the same value - I tailored the circuit
so
that I wouldn't need to buy several different values of power
resistors. R7 and R8 came from my junkbox, by the way, recycled from
old TVs, as their values are fairly uncritical.
When I made the first test, with 4.7µF at C1, my generator
oscillated. Not as bad as with the GB-160 AVR, but still it oscillated.
So I started reducing the capacitance value. At 1.8µF it still
oscillated, at 1.5µF it was marginally stable, and at 1.2µF it was
fully stable. So I kept 1.2µF, despite the fact that the only suitable
capacitor of this value that I had at hand was a special high-current
type with 4 terminals, a real waste in this application! It's the big
blue one in this photo, which shows my AVR in its final form, ready to
be installed, complete with some hot glue immobilizing large parts that
might otherwise vibrate.
If the value of C1 is changed by a large amount, R4 also needs to be
changed slightly, to keep the adjustment range centered around 230V.
With 4.7µF the correct value is 8.2kΩ. Below 1µF probably 10kΩ is
needed.
To complete comments on the circuit design, I may add that R8 and C2
form a snubber network to aid TRIAC turn-off, and that most likely
these are not necessary, but I added them for safety and peace of mind.
R7 is sized to limit the worst-case trigger current pulse to a value
that both Q2 and the gate of Q3 can take, and if you use this AVR with
a generator whose excitation winding delivers a very different voltage
than the 55V of mine, you should scale the value of this resistor
accordingly. The TRIAC is rated at 600V peak and 16A RMS, while the
optoTRIAC is rated at 800V peak, so this AVR should be able to control
pretty large generators. I used this oversized BTA16600 TRIAC
because I had some of them, they are inexpensive, widely available, and
have
an insulated tab, which facilitates mounting.
Reliability
 After
having to hack the original AVRs out of their epoxy potting, due to 3
failures in 11 years, I wanted to make my design more reliable
than that. I made a transformerless design. The resistors
have generous power and voltage margins. No electrolytic
capacitors were used,
because those are a very common cause of trouble in
long-term
use. To the extent possible the parts are used far below their maximum
ratings. The rectifier diodes were placed behind resistors, and with
capacitors across them, making them almost indestructible by voltage
spikes. In addition there is a varistor to clamp voltage transients,
which may be unnecessary to protect this AVR, but is useful to
protect other parts of the system, and prevent flashovers. The original
AVR instead has its diodes directly connected to the 230V input,
without any protection at all, which caused their destruction by a
transient from lightning hitting ground 600m away. The PCB was sprayed
with acrylic lacquer after soldering, to prevent corrosion.
After
having to hack the original AVRs out of their epoxy potting, due to 3
failures in 11 years, I wanted to make my design more reliable
than that. I made a transformerless design. The resistors
have generous power and voltage margins. No electrolytic
capacitors were used,
because those are a very common cause of trouble in
long-term
use. To the extent possible the parts are used far below their maximum
ratings. The rectifier diodes were placed behind resistors, and with
capacitors across them, making them almost indestructible by voltage
spikes. In addition there is a varistor to clamp voltage transients,
which may be unnecessary to protect this AVR, but is useful to
protect other parts of the system, and prevent flashovers. The original
AVR instead has its diodes directly connected to the 230V input,
without any protection at all, which caused their destruction by a
transient from lightning hitting ground 600m away. The PCB was sprayed
with acrylic lacquer after soldering, to prevent corrosion.
My main reliability-related worry is the relay. To avoid a transformer,
the relay has a 110VDC coil with 29kΩ resistance, which
is made from extremely fine wire. If anything corrosive gets
at
the
soldered ends of this wire, it might easily corrode through and make
the relay fail. I considered using a relay with a 220VAC coil instead,
which
would allow saving 8 components in one strike and also be much more
reliable thanks to the much thicker wire used in an AC relay coil, but
I was worried that during generator startup and slowdown, at low speed
and low frequency an AC relay might chatter and get damaged. If you
want to copy this AVR, and you have a suitable 220VAC relay at hand,
try it with
your generator. If it doesn't chatter, use it in place of my DC relay
and its power supply!
I hope to eventually design an AVR for this generator that doesn't need
a startup relay.
The PCB
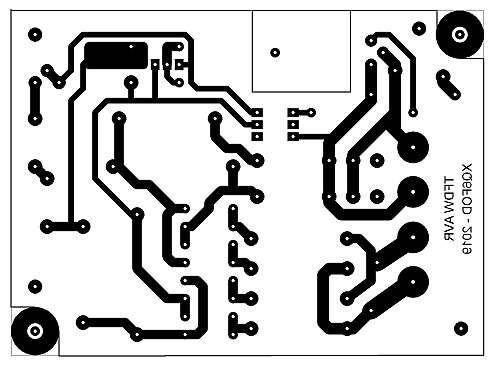 I
designed this board specifically to fit the metal shell of the original
AVR. Unless you are replacing an original TCEL CF-400 AVR and
want to re-use its shell, there is probably little point in exactly
copying my board design. Anyway very likely some of your components
will have different footprints than mine. But if you want to use it,
here it is. Click on it to get the high resolution version.
I
designed this board specifically to fit the metal shell of the original
AVR. Unless you are replacing an original TCEL CF-400 AVR and
want to re-use its shell, there is probably little point in exactly
copying my board design. Anyway very likely some of your components
will have different footprints than mine. But if you want to use it,
here it is. Click on it to get the high resolution version.
Please note: There is a bug
on
this PCB! Pin 4 of the optoTRIAC is connected to pin 1 of the TRIAC,
instead of pin 2! I'm getting old and I'm starting to do stupid things,
I know. I had to cut away that trace and
replace it by a wire. And I was too lazy to re-design the board just
for publication on this page.
Don't worry about the reversal of pin 4 and 6 of the optoTRIAC. That's
not a bug, since those pins are totally interchangeable. Likewise it
doesn't matter on which output terminal of the optoTRIAC R6
is. I
privileged easy layout over slavishly following the way I drew the
schematic, and then I was too lazy to change the schematic accordingly!
You will understand, I hope...
R4 is split into two series-connected resistors on the board. This is
because I didn't have any suitable 0.5W resistor at hand, so I used two
1/4W ones in series, 4.7 and 4.3kΩ.
Note that all traces have proper clearances to the borders of the
board, and those that have relatively high voltage between
them
also have that clearance between them. This is very important, and is
something many newcomers to PCB design tend to get wrong.
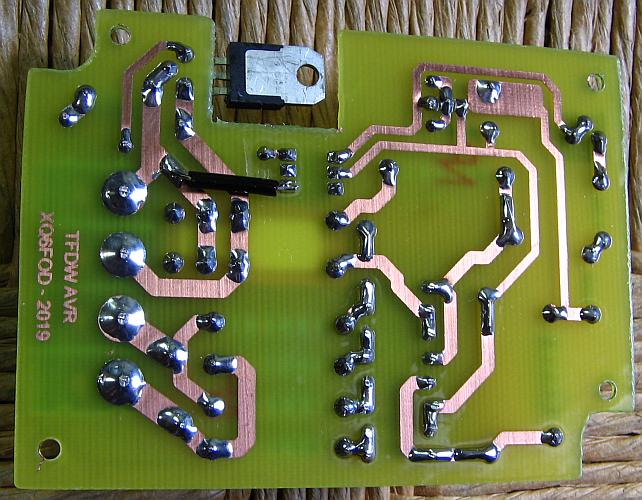 Here
you can see the soldered PCB. Note that a generous amount of solder was
used, and the terminals of large parts were bent over before soldering,
to avoid failures from vibration. I used good old 60/40 tin/lead
solder, as I'm unconvinced of the reliability of lead-free
solder.
Here
you can see the soldered PCB. Note that a generous amount of solder was
used, and the terminals of large parts were bent over before soldering,
to avoid failures from vibration. I used good old 60/40 tin/lead
solder, as I'm unconvinced of the reliability of lead-free
solder.
You can see the location of the wire bridge that fixes the bug I made
in the design.
I made this PCB by the photographic method, using presensitized board
material bought on eBay, and printing the design with a cheap inkjet
printer
on Pictorico Ultra Premium transparency material. That method is
practical and works every time. What I dislike is that the copper on
these boards seems to be very thin, and the board surface is groovy,
and the copper too - but it's good enough to work. I need to find some
better quality presensitized board material for more demanding PCBs.
Recently I made some experiments with the toner transfer method, but
with my laser printer it simply doesn't work, neither using magazine
paper nor using special transfer paper. And the results I have seen on
PCBs made by other people by the toner transfer method are poor, with
attacked, porous copper
traces. That doesn't happen with the photographic system, so I will
stick to this for now.
Performance
The AVR is working cleanly, providing a significantly better regulation
than the original one, thanks to its gain having been empirically
adjusted
as high as possible within stability constraints, by selection of C1's
value. But there are still a few volt of droop when the load
varies
between zero and maximum. Not enough to have practical effects, though.
As I write this web page, the generator with this
AVR is powering my home.
I would expect this AVR to work with most 230V brushless generators
that have a separate excitation winding, be it harmonic, outphased, or
a combination. It should be possible to use it with a wide range of
generator sizes, from the smallest all the way to 100kW and
somewhat beyond. It can be used with 230/400V three-phase generators by
sensing
only one phase, or the circuit could be modified by changing the
sensing rectifier to a three-phase bridge and adjusting some component
values. If this is done, C1 can be very much smaller for a given gain,
due to the much higher ripple frequency and lower ripple amplitude of a
rectified 3-phase signal, and this should allow higher gain and thus
tighter regulation.
Of course it can also be used with brush-type generators that have an
excitation winding, like the Chinese ST line. Since these are far less
critical regarding loop stability, I would suggest to start
testing with 4.7µF for C1 and 8.2kΩ for R4 (3.9 and 4.3kΩ in series, if
you use 1/4 watt resistors). Most likely it will be stable, and have a
droop of less than one volt.
Back to homo ludens electronicus.
 I
designed this board specifically to fit the metal shell of the original
AVR. Unless you are replacing an original TCEL CF-400 AVR and
want to re-use its shell, there is probably little point in exactly
copying my board design. Anyway very likely some of your components
will have different footprints than mine. But if you want to use it,
here it is. Click on it to get the high resolution version.
I
designed this board specifically to fit the metal shell of the original
AVR. Unless you are replacing an original TCEL CF-400 AVR and
want to re-use its shell, there is probably little point in exactly
copying my board design. Anyway very likely some of your components
will have different footprints than mine. But if you want to use it,
here it is. Click on it to get the high resolution version.